
Methods such as relative speed, brake tracking model and running track prediction are adopted to implement cooperative control among virtual marshalling train units, which can realize cooperative safe running of trains in starting, cruising, precise stopping, dynamic marshalling/unmarshalling and other scenarios.
1. Relative speed and brake tracking model
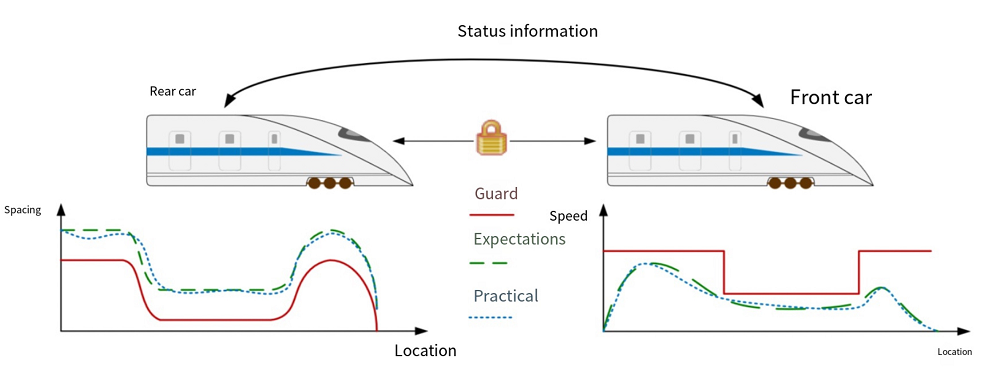
Any train takes the train in front as the tracking object, obtains the real-time state of the train in front through vehicle-vehicle communication, and calculates the safety protection speed of the two cars without displacement coincidence, so that it can match its deceleration speed according to the braking rate of the following car.
2. Predictive based collaborative control
Based on the train kinematics model, the predictive control is carried out to achieve speed convergence, maintain stable interval, and synchronize start and stop.


+852-60606742
TCT Building, No.3 Zhicheng North Street, Fengtai District, Beijing 京ICP备11000314号 京ICP备11000314号-1
